
This post is an excerpt from the journal ISA Transactions. All ISA Transactions articles are free to ISA members, or can be purchased from Elsevier Press.
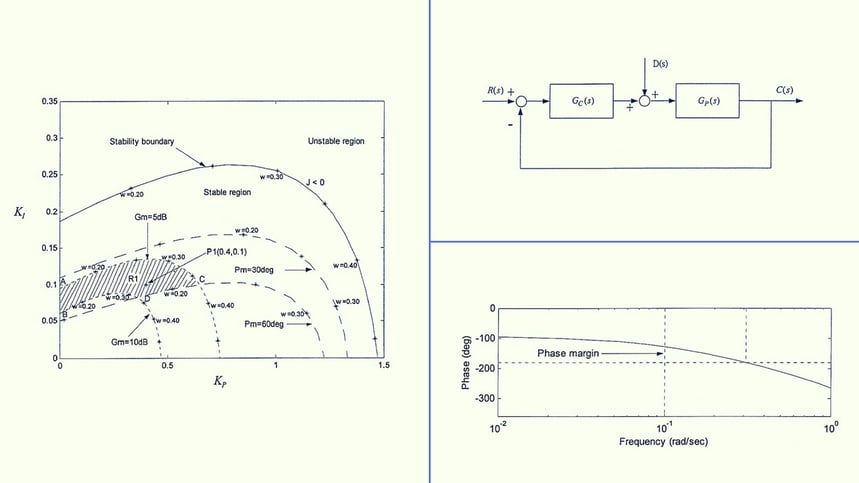
Abstract: A robust PID controller for a non-minimum phase system subject to uncertain delay time is presented in this paper. Utilizing the gain-phase margin tester method, a specification-oriented parameter region in the parameter plane that characterizes all admissible controller coefficient sets can be obtained. The PID controller gains are then directly selected from the parameter region. Henceforth, the designed controller can guarantee the system at least a pre-specified safety margin to compensate for the instability induced by the time delay. A compromise between the robustness and tracking performance of the system in the presence of time delay is achieved. Simulation results indicate that the proposed method performs a good time response, and robustness is obtained effectively.
Free Bonus! To read the full version of this ISA Transactions article, click here.
Enjoy this technical resource article? Join ISA and get free access to all ISA Transactions articles as well as a wealth of other technical content, plus professional networking and discounts on technical training, books, conferences, and professional certification.
Click here to join ... learn, advance, succeed!
2006-2018 Elsevier Science Ltd. All rights reserved.

