
This post is an excerpt from the journal ISA Transactions. All ISA Transactions articles are free to ISA members, or can be purchased from Elsevier Press.
Abstract: We develop a novel adaptive tuning method for classical proportional–integral–derivative (PID) controller to control nonlinear processes to adjust PID gains, a problem which is very difficult to overcome in the classical PID controllers. By incorporating classical PID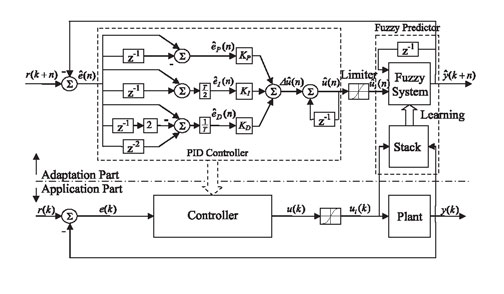 control, which is well-known in industry, to the control of nonlinear processes, we introduce a method which can readily be used by the industry. In this method, controller design does not require a first principal model of the process which is usually very difficult to obtain. Instead, it depends on a fuzzy process model which is constructed from the measured input–output data of the process. A soft limiter is used to impose industrial limits on the control input. The performance of the system is successfully tested on the bioreactor, a highly nonlinear process involving instabilities. Several tests showed the method's success in tracking, robustness to noise, and adaptation properties. We as well compared our system's performance to those of a plant with altered parameters with measurement noise, and obtained less ringing and better tracking. To conclude, we present a novel adaptive control method that is built upon the well-known PID architecture that successfully controls highly nonlinear industrial processes, even under conditions such as strong parameter variations, noise, and instabilities.
control, which is well-known in industry, to the control of nonlinear processes, we introduce a method which can readily be used by the industry. In this method, controller design does not require a first principal model of the process which is usually very difficult to obtain. Instead, it depends on a fuzzy process model which is constructed from the measured input–output data of the process. A soft limiter is used to impose industrial limits on the control input. The performance of the system is successfully tested on the bioreactor, a highly nonlinear process involving instabilities. Several tests showed the method's success in tracking, robustness to noise, and adaptation properties. We as well compared our system's performance to those of a plant with altered parameters with measurement noise, and obtained less ringing and better tracking. To conclude, we present a novel adaptive control method that is built upon the well-known PID architecture that successfully controls highly nonlinear industrial processes, even under conditions such as strong parameter variations, noise, and instabilities.
Free Bonus! To read the full version of this ISA Transactions article, click here.
Join ISA and get free access to all ISA Transactions articles as well as a wealth of other technical content, plus discounts on events, webinars, training & education courses, and professional certification.
Click here to join ... learn, advance, succeed!
2006 Elsevier Science Ltd. All rights reserved.

